
منصة نقالة

منصة نقالة

منصة نقالة
تشنغتشو سينكولا الماكينات والشركة المحدودة. مصنع ماكينات البليتيزر ![]()




منصة نقالة
منصة نقالة
منصة نقالة
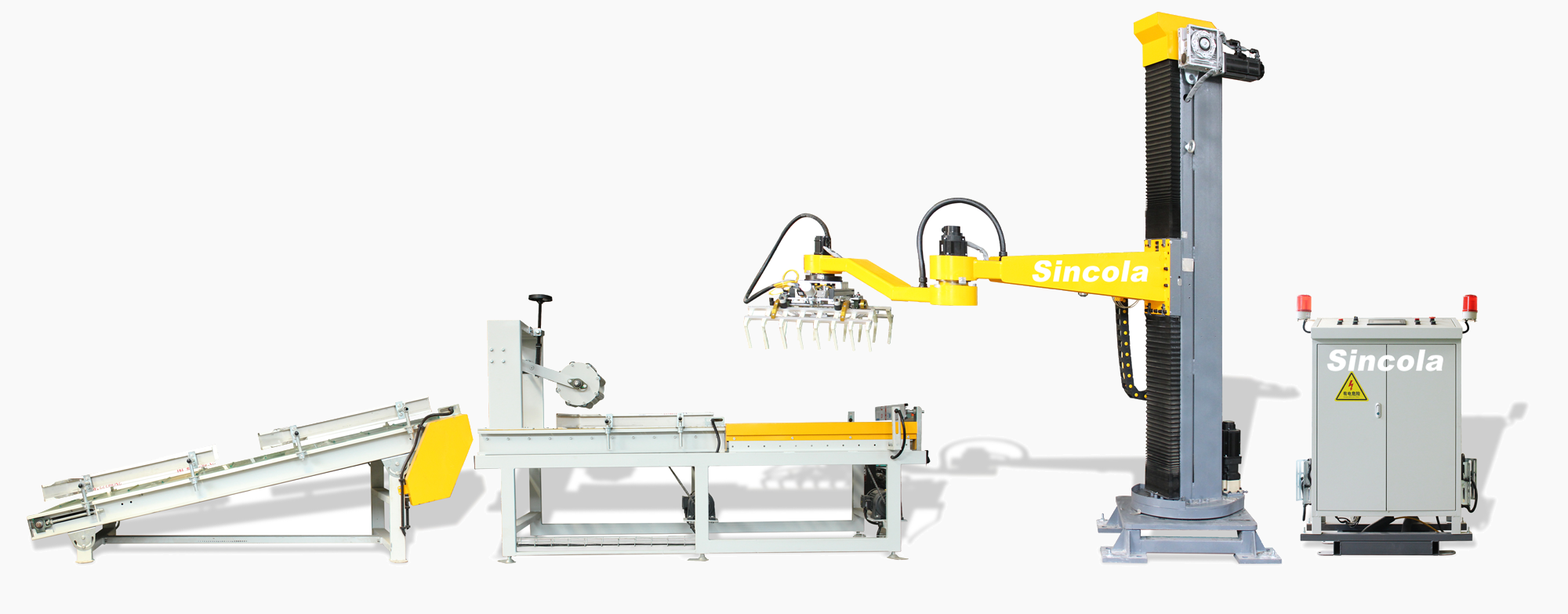
نموذج:SDB-400MD
كفاءة البليت: 400 مرات / ساعة
الحمولة القصوى: 100كلغ
الحد الأقصى لنطاق النشاط: 1950مم
كرر دقة تحديد المواقع:+0.3مم
نطاق العمل:
المحور S: تربة 180 °
المحور Z: 1800مم
محور R: تربة 180 °
سيارات الأجرة: تربة 360 °
المنتجات القابلة للتطبيق: شنطة, صندوق, حاجز, ورق مقوى, لوح خشبي, إلخ.
إمدادات الطاقة إمدادات الطاقة: 3*ايه سي 380 + ن
ارتفاع المنصات: 1600مم (يمكن تخصيص أحجام أخرى)
مصدر الهواء: 0.4-0.6mpa
وزن: 1500كلغ
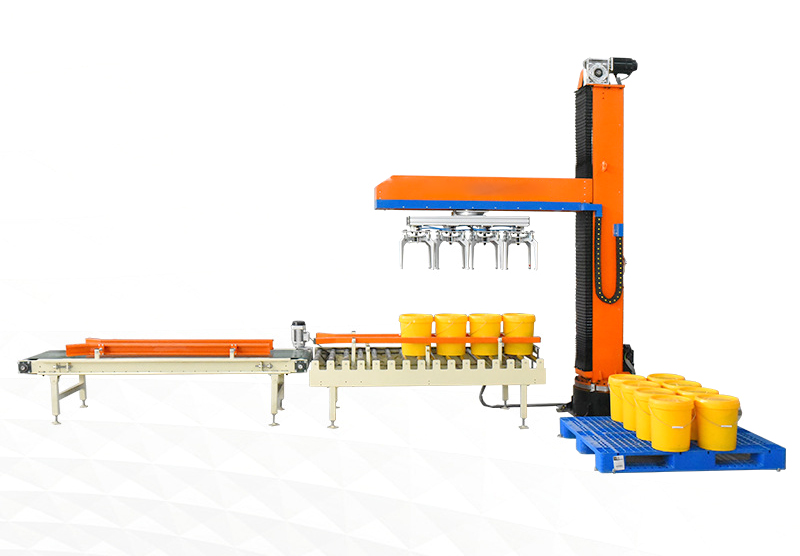
The column straight arm palletizer adopts a robot control system to achieve linear interpolation from point to point, مما يجعل الحركة سلسة وسائلة.
تتحكم قلادة التدريس في حركة الروبوت الصناعي من خلال وظائف التحكم والعرض الرئيسية, مما يسمح للمشغلين بالتدريس والتحكم في حركة محدد الموضع بسلاسة.
يمكن تخزين نمط التراص مسبقًا وتشغيله بمرونة للإضافات اللاحقة.
It can complete the column straight arm palletizer of bagged products according to the required grouping method and layers during operation.
Column straight arm palletizer Packaged materials are conveyed to the designated palletizing area. الروبوت العمودي, من خلال التنسيق بين كل محور, ينقل التركيب إلى أعلى موضع المادة مباشرةً.
عندما يتم إرسال إشارة تحديد المواقع المادية, يتحرك الجهاز إلى الأسفل (حركة المحور Z للأسفل) يتم التحكم فيها بواسطة محرك سيرفو.
عندما يصل الجهاز إلى الارتفاع المناسب لحمل المادة, يتوقف المحور Z عن الهبوط, يفتح الجهاز ويمسك بالمواد.
ينعكس محرك سيرفو المحور Z, رفع الجهاز إلى ارتفاع آمن ونقل المواد إلى موضع التحميل وفقًا للبرنامج المحدد مسبقًا للعميل.
ينزل المحور Z, وضع المادة في النقطة المحددة. عند هذه النقطة, يفتح المباراة, وضع المادة في الموضع المحدد. بعد الانتهاء من عملية البليت بأكملها, يصدر صوت إنذار للإشارة إلى الانتهاء. تقوم الرافعة الشوكية بعد ذلك بإزالة البليت ووضعها على واحدة جديدة, جاهز لتكرار العملية.





